Safety over EtherCAT을 통한 안전한 데이터 전송
- EtherCAT Technology Group
Safety over EtherCAT은 무엇인가?
기능 안전은 최신 네트워크 아키텍처 및 통신 시스템의 필수 요소이다. EtherCAT은 Safety over EtherCAT 프로토콜(FSoE = Fail Safe over EtherCAT)을 사용하여 같은 네트워크에 있는 표준 데이터와 병행하여 안전 관련 데이터 전송의 가능성을 제공한다. Safety over EtherCAT을 사용하는 통신 시스템은 Black Channel(그림 1)의 일부로 데이터 보호의 일부로 간주되지 않는다. Safety over EtherCAT은 IEC 61508에 따라 개발되고 IEC 61784-3에서 국제 표준화된 TÜV 인증 기술이다. 안전성 데이터는 표준 프로세스 데이터에 컨테이너(그림 2)와 통합되어 무결성을 위한 추가 데이터와 결합된다. FSoE 마스터와 FSoE 슬레이브 간의 안전 연결은 각 안전 사이클마다 완벽하게 모니터링 된다. 안전 프레임의 체크섬, 연결 ID 및 각 FSoE 프레임 전송에 대한 감시 시간이 모두 확인된다.
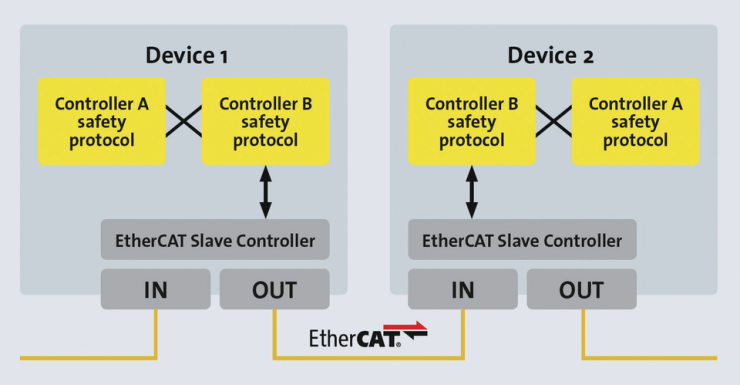
그림 1. Black Channel 원리 덕분에 표준통신 인터페이스를 사용할 수 있다
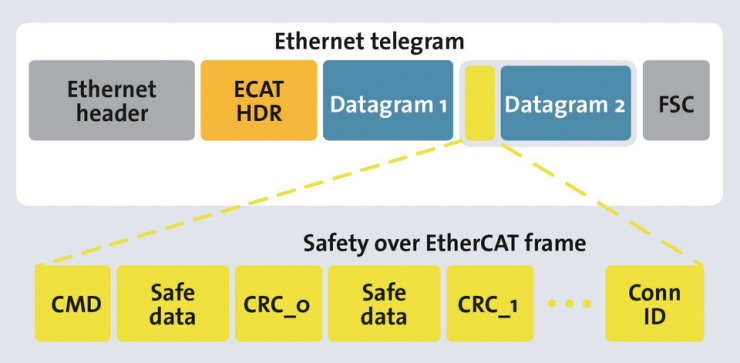
그림 2. FSoE 프레임 (안전 컨테이너)은 주기적 통신의 프로세스 데이터에 내장되어 있다
EtherCAT을 통한 안전 통합
장치 제조업체는 쉽고 고성능 구현을 제공하는 간결한 FSoE 사양을 높이 평가한다. EtherCAT 기술 그룹(ETG)은 FSoE 구현 및 인증뿐만 아니라 장치 수명주기의 모든 단계에서 광범위한 지원을 제공한다. 또한 장치 공급 업체가 사양을 준수하는 데 도움이 되는 공식 도구 및 서비스를 사용할 수 있다. 사전 인증 소프트웨어 스택을 사용하면 통합 시간을 단축할 수 있다. 다양한 제공 업체가 제공하는 다양한 지원 서비스를 통해 Safety over EtherCAT를 제품 포트폴리오(제조 또는 구매)에 쉽게 통합할 수 있다. EtherCAT을 통한 안전성을 통해 항상 선택이 가능하다.
TÜV와 긴밀한 협조 하에 ETG는 FSoE 사용에 대한 요구 사항을 정의하고 적합성 테스트를 개발했다(그림 3). 결과적으로, FSoE 구현 및 FSoE 테스트 서비스 공급자의 자동 테스트를 위한 Safety over EtherCAT 적합성 테스트 도구를 사용할 수 있다.
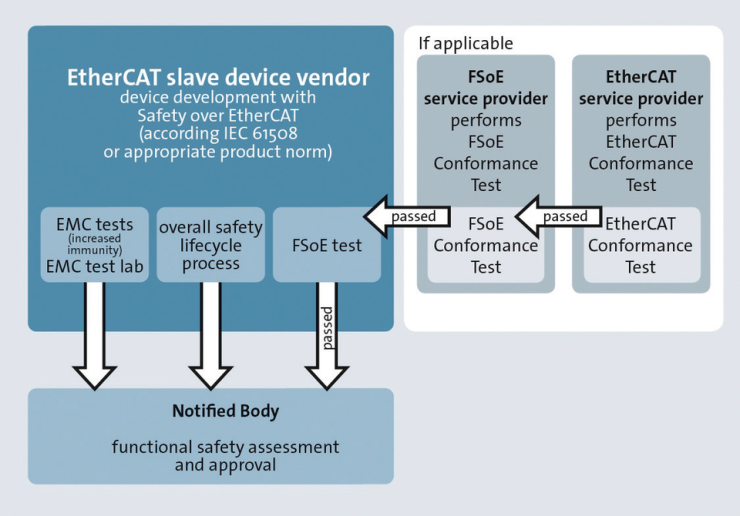
그림 3. 적합성: 장치 평가 및 승인
공장 전체의 안전 솔루션
통신 시스템으로부터의 독립성은 또한 플랜트 구성 요소의 안전 관련 네트워킹을 단순화한다. Safety over EtherCAT 컨테이너는 표준 EtherCAT 장치 및 컨트롤러를 통해 라우팅되며 시스템의 한 부분에서 다른 부분으로 평가된다(그림 4).
포괄적인 비상 정지 기능과 기계 모듈의 대상 종료는 기본 이더넷과 같은 다른 통신 시스템을 통해 서로 연결되어 있어도 쉽게 구현할 수 있다.
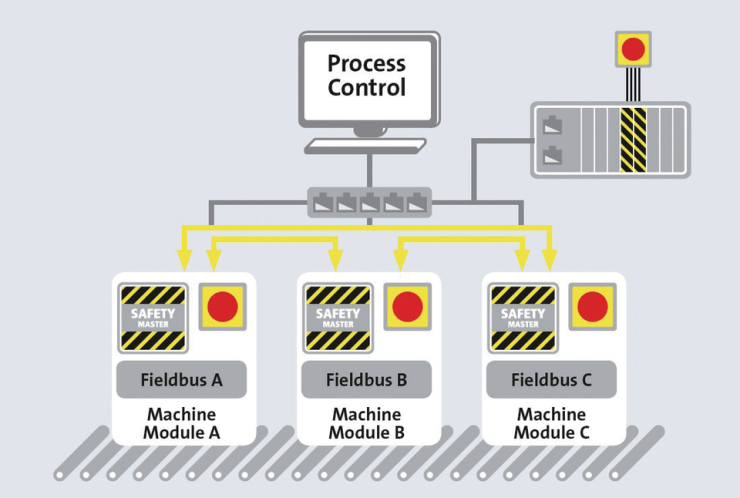
그림 4. 공장 전체의 안전 통신 사례
데모는 어떻게 작동하는가?
Safety over EtherCAT 데모(그림 5)는 서로 다른 제조업체의 장치를 보여준다. 두 개의 EtherCAT 네트워크는 각기 다른 기계 모듈을 나타내며 각각은 자체 EtherCAT 마스터를 가진다. 주 스트랜드는 Weidmüller의 안전 I/O 및 TR-electronic의 안전 인코더뿐만 아니라 Stöber의 안전 기능이 있는 드라이브 컨트롤러와 연결된 Beckhoff의 분산형 안전 제어 시스템을 특징으로 한다.
안전 컨트롤러는 지역 안전 비상 정지 버튼, SICK의 라이트 커튼 및 Leuze의 레이저 스캐너와 같이 분산된 안전 I/O 어셈블리에 연결된 안전 센서를 평가한다. 라이트 커튼이 차단되거나 비상 정지 버튼이 눌러지면 드라이브는 안전 상태 SS1(안전 정지 1)로 설정된다. 홀드는 RESET 버튼을 눌러 확인해야 하며 다시 시작 버튼을 눌러 시작해야 한다.
레이저 스캐너에 접근하면 SLS(안전 제한 속도) 기능이 드라이브에서 처음 활성화되고 톱날은 줄어든 속도로 작동한다. 특정 거리 한계에 도달하면 SS1이 트리거 된다. 운전 모드 스위치가 AUTO에서 MANUAL로 설정되면 드라이브가 정지하고 기계 설정을 위해 안전한 속도로 엔코더에서 휠을 사용하여 수동으로 작동할 수 있다.
두 번째 네트워크의 비상 정지 버튼(즉, 기계 모듈)은 안전 I/O 어셈블리에 연결되며 Lenze의 안전 컨트롤러에 의해 평가된다. 이 안전 컨트롤러와 Beckhoff 세이프 컨트롤러 사이에는 표준 EtherCAT 마스터 및 이더넷 연결을 통해 라우팅되는 Safety over EtherCAT 연결이 있다. 이것은 공장 전체의 비상 정지 기능을 보여준다. 블레이드는 또한 두 번째 기계 네트워크를 통해 안전하게 종료될 수 있다.

그림 5. 기능적 멀티 벤더 Safety over EtherCAT 데모
[출처] FA VISION / 2019. 06



댓글
댓글 쓰기