[Beckhoff 인터뷰] "TwinCAT Vision은 하나의 시스템에서 모션과 Vision을 같이 사용함으로써, 둘 간의 동기화가 가능" - 정명오 부장 인터뷰
Beckhoff 정명오 부장 인터뷰

Beckhoff 정명오 부장
Q. TwinCAT Vision은 독립형 머신비전에 비해 어떤 이점을 제공하나?
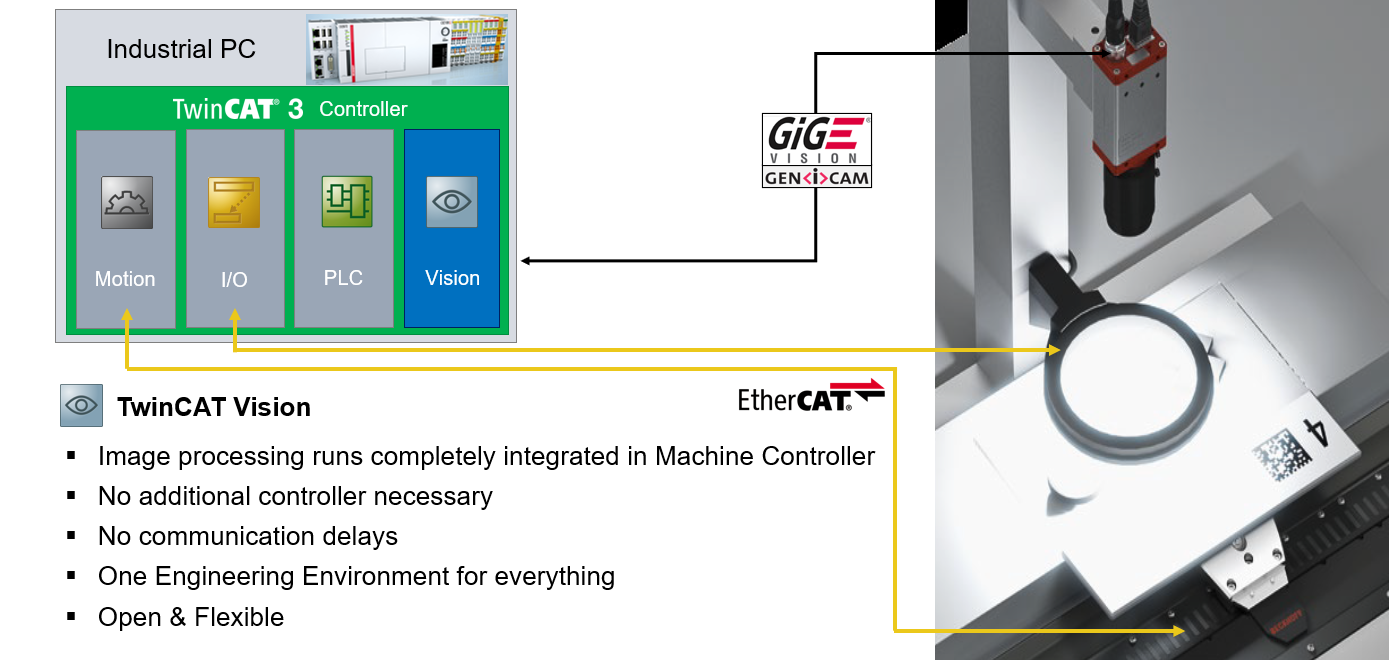
A. 일반적인 독립형은 별도의 비젼 컨트롤러를 두고 PLC와 같은 산업용 제어기와의 인터페이스를 해서 활용을 하는 구조로 되어 있습니다. 이러한 구조에서는 필연적으로 비젼 시스템과 제어기간에 지연이 발생 하고, 시스템 구축 문제, 유지 보수 문제 등 안정성 확보등에서 많은 문제들이 있을 수 있습니다. 왜냐하면 이러한 시스템 들은 함께 작업 하도록 설계되지 않았기 때문입니다.
시스템 엔지니어들이 여러 다른 벤더들의 하드웨어와 소프트트웨어를 통합해야 하는 번거로움이 따르게 되는데, TwinCAT3 Vision은 별도의 추가 구성요소 없이 PLC 명령어로 이미지 프로세싱을 할 수 있도록 구성되었기 때문에 영상 전문가가 아닌 일반 PLC 프로그래머가 쉽게 영상 처리 알고리즘을 설계하여 다양한 제품에 적용할 수 있는 유연한 알고리즘을 제공하고 있습니다.
Q. TwinCAT Vision은 장비 설비에 어떠한 이점을 제공하나?
A. 비젼 설비들은 동일한 품질의 이미지를 얻기 위해서 많은 반복 촬영과 시간을 소비하게 됩니다. 동일한 품질을 얻기 위한 제약 요소들 중 모션과의 연동 부분 에서의 일정하지 않은 지연 요소들로 인해서 둘 간의 적절한 조건들을 찾기 위한 힘든 과정을 겪게 됩니다.
TwinCAT Vision 은 하나의 시스템 에서 모션과 Vision 을 같이 사용함으로써 둘 간의 동기화를 할 수 있어서 지연을 최소화 하여 Tack time을 줄일 수 있고, 동일 품질의 이미지를 취득 하는 것이 용이 합니다. 뿐만 아니라 하나의 시스템 (제어기)에서 사용할 수 있기 때문에 비젼을 위해서 별도의 PC가 차지하는 공간도 줄일 수가 있습니다.
TwinCAT Machine Vision
Q. 기계와 모션 제어와의 긴밀한 동기화는 기계 제작자들에게 어떤 의미를 지니나?
A. 앞서 얘기한 것과 같이, 이들과의 동기화는 많은 시너지를 낼 수 있습니다.
Tack time 감소를 통한 생산성 향상과 제품의 품질을 높일 수 있는것과 같은 직접적인 이점뿐만 아니라, 기계 제작자들 에게는 비전시스템과의 협업에서 소요 되는, 시간도 줄일 수가 있습니다.
Q. TwinCAT Vision의 어플리케이션의 범위는 어떻게 되나?
A. 다른 Machine vision 에서의 기능과 동일하게 표면 검사(이물질 검사), 결함 검출, 크기 및 모양 확인, 부품 누락 여부 검사, 올바른 장착, 배치 검사, 바코드 리딩등 다양한 응용 분야에 TwinCAT Vision 을 적용 할 수 있습니다. 이와 같은 머신비젼의 독립적인 기능 뿐만 아니라 TwinCAT이 가진 다른 기능들, TwinCAT HMI, IoT, Machine learning 등의 기능들을 접목하여 더 다양한 어플리케이션에 사용될 것으로 봅니다.
Q. TwinCAT Vision은 어떤 펑션블록을 제공하나?
A. 제공하는 미지 프로세싱 관련 함수는 500 개가 넘으며 기존의 PLC 언어를 알고 있는 고객이라면 누구나 쉽게 이용할 수 있습니다. 기본 적인 Code reading 에 필요한 “F_VN_ReadBarcodeExp” 평션블록 이나 외곽 검출 “F_VN_MatchContours1vsN” 및 패턴 매칭 을 위한 “F_VN_MatchTemplateAndEvaluate” 펑션블록 등이 제공 됩니다.
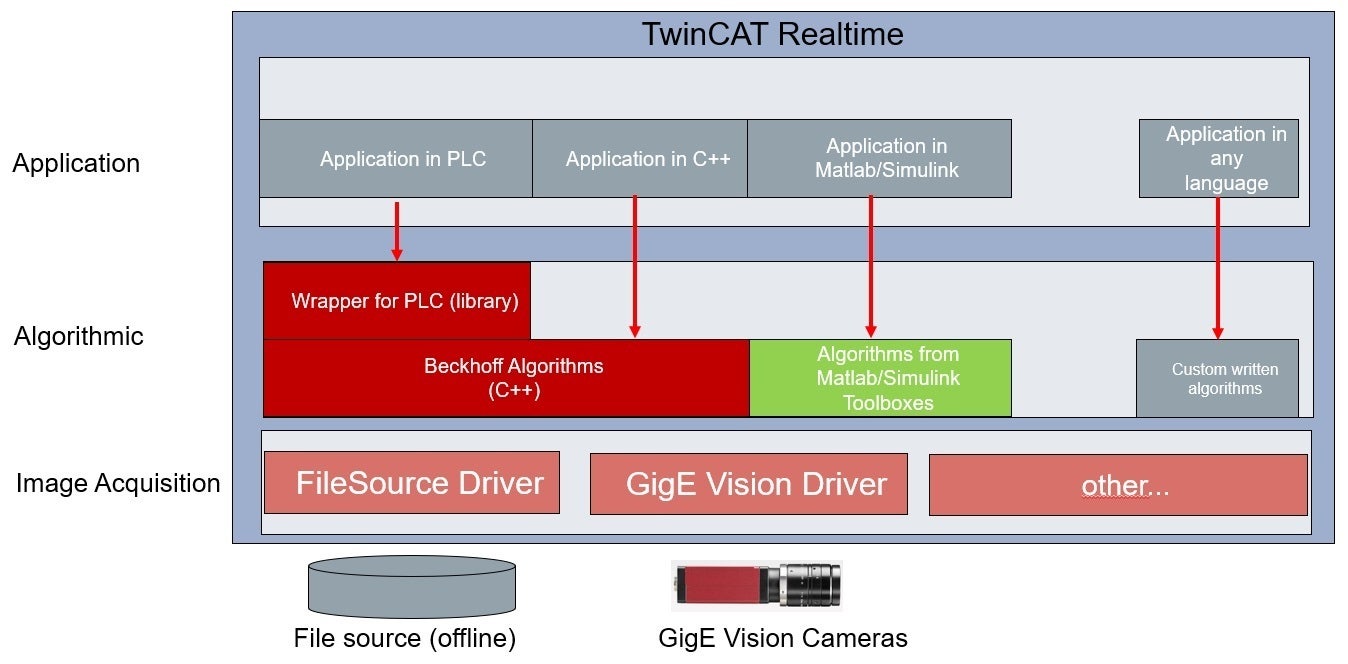
TwinCAT Vision 구조
또한, 현재까지는 PLC 라이브러리 형태로 제공되고 있지만, 향후에는 사용자가 작성한 알고리즘이나 Matlab/Simulink Toolboxes 에서 제공하는 외부 알고리즘 까지 사용할 수 있는 기능을 추가할 계획이다.
Q. TwinCAT에서는 CPU 비전의 퍼포먼스 를 높이기 위해 어떤 기능들을 제공하나?
A. 여러분들도 잘 알고 있듯이 영상 처리는 많은 CPU 자원을 필요로 합니다. 그래서 부하를 분산 하기 위해서 영상처리는 GPU, 그래픽 카드를 사용합니다. 하지만, 산업현장과 같이 열악한 환경에서 견딜 수 있는 그래픽카드는 찾기가 어렵거나 아주 고가 입니다.
그래서 비용을 줄이고, 안정적으로 영상알고리즘을 구현 하기 위해서는 영상을 병열 처리 하는 기술이 필요 합니다. TwinCAT3 는 PC의 코어들을 분산 처리 하고, 동기화 할 수 있는 기반이 갖추어져 있습니다.
이러한 구성을 기반으로 Idle Core 를 TwinCAT Vision 알고리즘을 활용할 수 있게 구성할 수 있어서 많은 비용을 드리지 않고도 이미지 처리 속도를 높일 수 있습니다.
뿐만 아니라 필요한 시점에 작동 시킬 수 있는 Job Task 와 이를 실행 하는 코어들의 병렬 처리를 통해서 더 많은 코어를 활용한 빠른 이미지 처리 결과를 받을 수도 있게 됩니다.
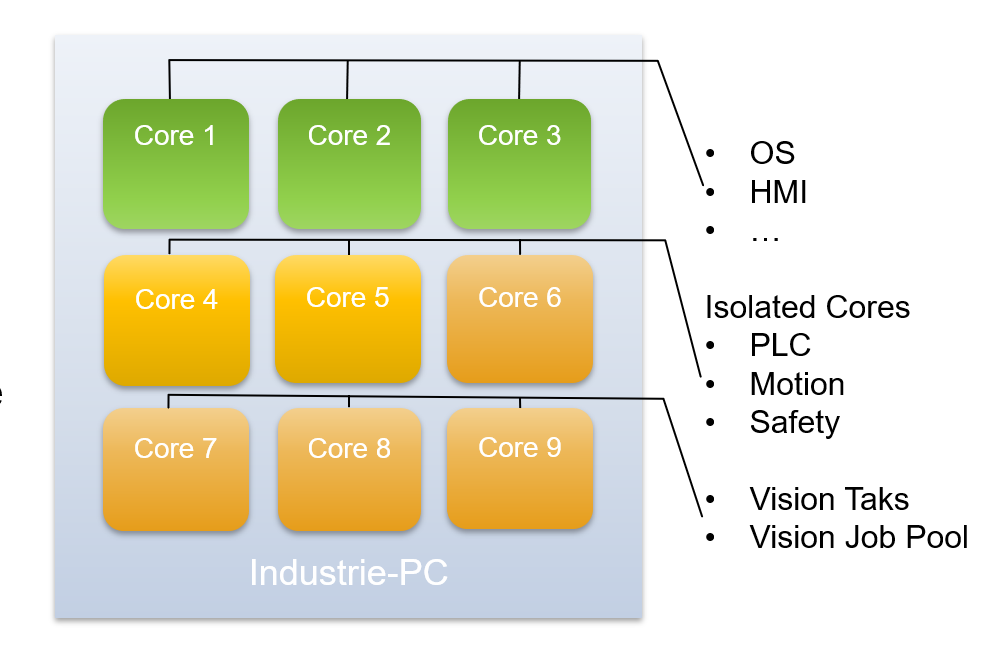
TwinCAT의 멀티 코어 활용
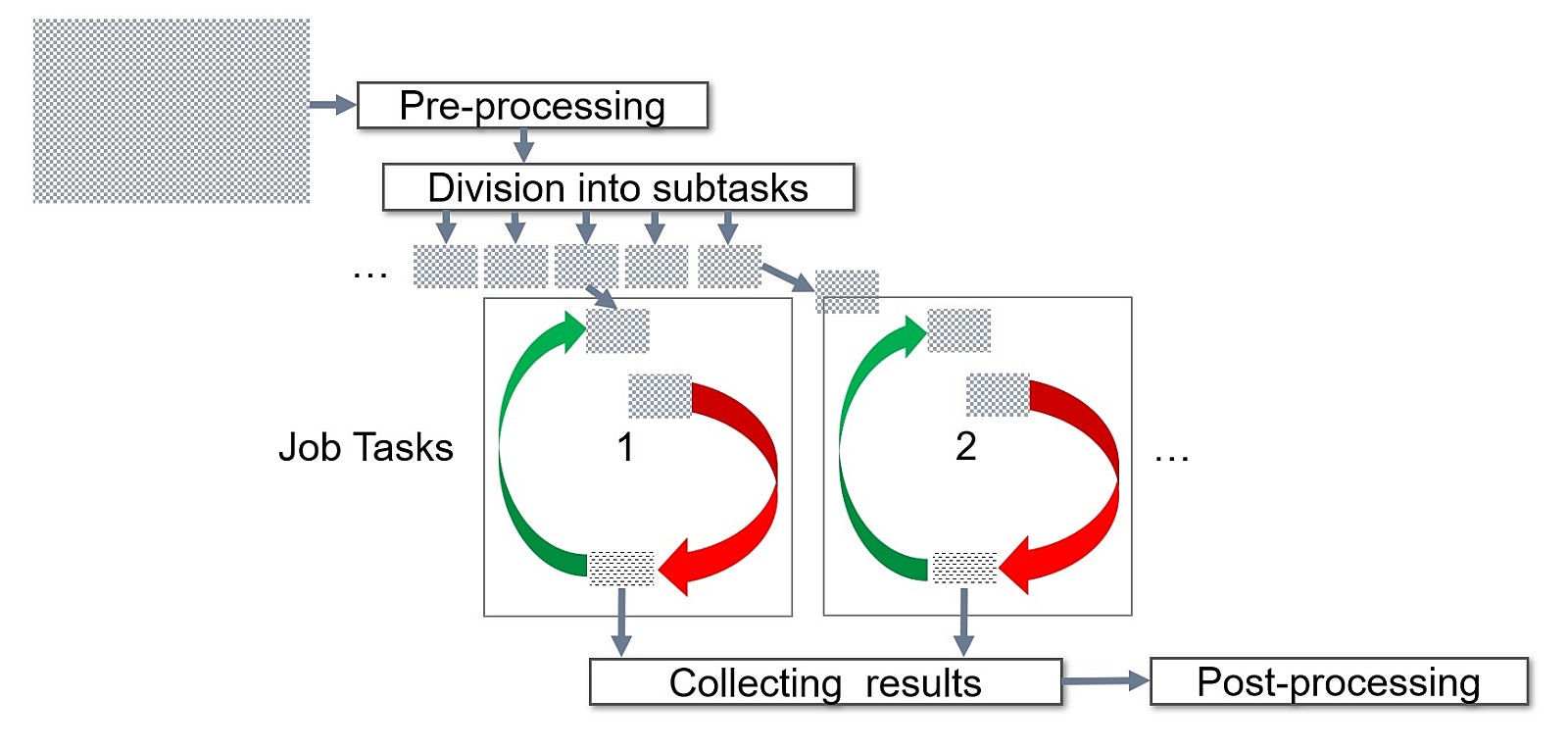
Job Task를 이용한 병렬 이미지 처리
Q. LED I/O로는 어떤 것들이 있나?
A. EtherCAT 통신 기반의 LED Illumination Terminal들을 제공하고 있습니다. 출력 전압 (24VDC, 48VDC) 이 고정적인 두 가지 제품, EL2596-0000, EL2596-0010과 출력 전압을 변경 할 수 있는 EL2595 등 다양한 제품이 있으며 모두 펄스 출력 모드와 지속 출력 모드를 제공하고 펄스 출력 모드는 최대 3A, 지속출력 모드는 1.2A 까지 출력 제어가 가능합니다.
EtherCAT 통신을 사용하여 프로그램으로 전류 컨트롤이 가능 하며 모션과 조명 동기화를 할 수 있습니다. 정밀한 제어로 인해 에너지 소비가 낮아 지고 LED 수명 연장, 하나의 전원 공급 장치로 더 많은 조명 전원을 공급 할 수 있는 장점이 있습니다.
Q. 통합형 머신비전의 수요전망을 어떻게 하나?
A. 앞서 설명에서와 같이 통합형 머신 버전은 많은 장점을 가지고 있습니다. 하지만 기존 제품에 익숙한 고객들이 대다수 이고, 현재 까지 많은 제품들이 스마트 비전이나 PC 비전과 같은 형태가 주를 이루고 있습니다. 하지만 점점 더 AI 비젼과 같은 제품에 관심이 집중 되고 있고 이러한 기능을 사용자가 주어진 기능들을 조합해서 자신들만의 솔루션을 만들고 기술을 내재화 할 수 있는, 통합형 머신비전이 점차 많은 비중을 차지 할 것으로 예상 합니다.
Q. 머신비전의 기술 트렌드를 어떻게 전망하나?
A. 4차산업 혁명에 요구 되는 완전자동화 시스템으로의 변화에 있어서 머신 비젼은 이미지 프로세싱 에서 그치지 않고 머신러닝에 필요한 데이터 취득 요소로써의 역할까지 폭넓게 활용될 것으로 보여집니다. TwinCAT 또한 4차산업혁명을 준비하는 기업으로써 TwinCAT 머신 러닝 기능과 머신비전을 하나의 솔루션에서 구현 할 수 있도록 준비하고 있습니다.
Q. TwinCAT Vision의 시장확대전략은 어떻게 전개하고 있나?
A. TwinCAT Vision 은 현장 테스트를 완료하고 금년 5월달 정식 릴리즈가 되었습니다.
통합형 머신비젼의 특성상 시장 진입장벽이 높은 독립형 머신버전 시장 보다는 현재TwinCAT을 사용하고 있고 머신 비전 기능이 필요한 고객들을 대상으로 적용하여 장비의 품질과 제품의 품질을 높일 계획이며 이후 TwinCAT 의 유연하고 다양한 기능을 기반으로 여러 고객들에게 맞춤형 솔루션을 제공하여 시장을 확대할 예정 입니다.
[출처] 무인화기술 10월호
[원본] https://drive.google.com/file/d/1BRyLhnZTlVFt9N9gi5qlmSM_BcB5o5qe/view?usp=sharing



댓글
댓글 쓰기