[쉽고 간단한 안내서] Beckhoff 시스템으로 스텝 모터(Step Motor) 사용하기
많은 사람들이 Beckhoff에서 AX5000
혹은 AX8000 시리즈와 같이 일반적인 서보 드라이버를 제공하고 있다는 것은 알고
있습니다. 실제로 다양한 시스템에 Beckhoff의 서보 드라이브가
적용되어 있습니다. 하지만 스텝 모터[1]와 스텝 모터 드라이브를 제공하고 있다는 것을 알고 있는 사람은 많지 않은 것 같습니다.

Beckhoff의 스텝 모터 드라이브
제품
소개
Beckhoff에서는 스텝 모터와 스텝 모터 드라이브를 제공하고 있습니다.
위 그림과 같이 Beckhoff의 스텝 모터 드라이브는 I/O
Terminal 제품군에 속합니다. 여담으로 서보 드라이브 또한 I/O
Terminal 형태로 사용할 수 있지만 다음 기회에 다루도록 하겠습니다. 다시
본론으로 돌아와서, Beckhoff의 스텝 모터 드라이브는 EtherCAT 통신 환경에서 사용할 수 있습니다. 다른 필드버스 통신으로도 스텝 모터를 사용할 수는 있지만
하나의 형태로 된 스텝 모터 드라이브는 제공하지 않습니다.
스텝 모터 드라이브, 즉 스텝 모터 터미널의 제품은 기본적으로 EL7031, EL7041을 꼽을 수 있습니다. 이 외에 Vector 제어를 할 수 있는 EL70x7, Safety를 사용할 수 있게 STO Input이 있는 EL70xx-9014 제품이 있습니다. 가장 기본적인 제품을 통해 알아보고자 EL70x1에 초점을 맞추고자 합니다.
우선 제품부터 살펴보겠습니다.

두 제품은 공급 전압이나 출력 전력이 다르며, EL7047은 엔코더를 함께 연결할 수 있습니다. 매우 컴팩트한 사이즈로 unipolar,
bipolar 스텝 모터 둘 다 연결할 수 있습니다. 다만,
Beckhoff의 스텝 모터가 아닌 타사의 모터를 이용할 경우, bipolar 모터만
사용할 수 있습니다.
시스템
구성
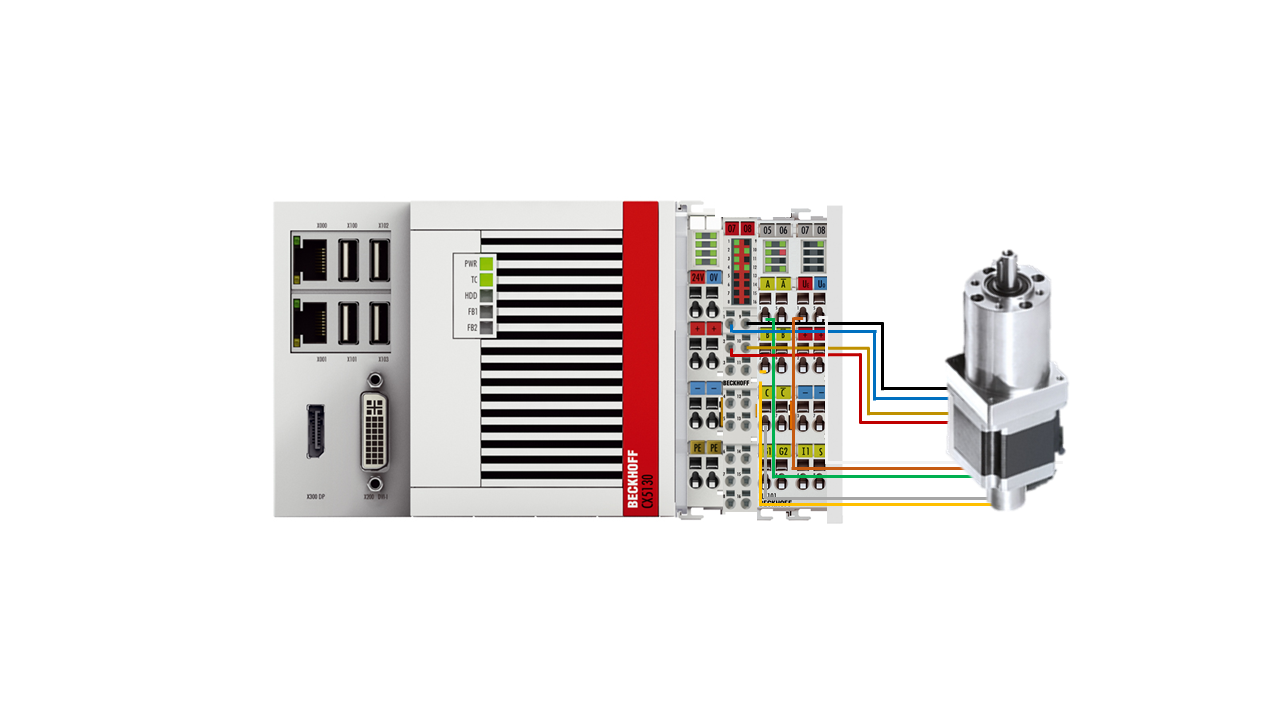
스텝 모터 터미널을 이용해서 아래와 같은 형태로 시스템 구성을 할 수 있습니다.
-
공통 환경: EtherCAT 통신, Beckhoff EPC CX5130 및 Beckhoff 스텝 모터 사용
EL7031을 이용한 시스템 구성
EL7041을 이용한 시스템 구성
스텝 모터 드라이브를 사용하지 않을 경우
스텝 모터 드라이브를 사용하지 않을 경우에는 스텝 모터의 Pulse를 그대로 이용하여 제어할 수 있습니다. 이 때 이용하는 것이 EL2522와 같은 Pulse Train 터미널입니다. 여기에 엔코더를 이용하는 모터를 사용할 경우에는 EL5101와 같은 Incremental 엔코더 터미널을 추가하여 사용할 수도 있습니다.
이러한 방법은 EtherCAT 통신이 아닌 다른 필드버스를 사용할 때에도 이용할 수 있습니다. 이 경우에는 KL2522, KL5101 터미널을 사용합니다.
마찬가지로 제품부터 살펴보겠습니다.

스텝 모터는 전자적인 Pulse를 기계적인 운동으로
변환하는 모터입니다. 때문에 Pulse Train을 이용하여 Pulse를 보내주면 그 만큼 모터가 동작하는 것을 생각해 볼 수 있습니다. 이럴 경우 사용하는 것이
EL2522와 같은 터미널입니다.
Pulse만을 이용하여 제어할 수도 있지만 서보 모터처럼 위치 결정의 정확도를 높이기
위하여 엔코더를 사용하는 모터도 있습니다. 모터의 피드백을 받아서 제어할 경우에는 EL5101을 이용합니다.
시스템
구성
EL2522와 EL5101 이용해서 아래와 같은
형태로 시스템 구성을 할 수 있습니다.
-
공통 환경: EtherCAT 통신, Beckhoff EPC CX5130 및 Beckhoff 스텝 모터 사용
EL2522와 EL5101을 이용한 시스템
구성
EL2522의 경우 2 Channel까지 지원하므로
모터를 2개 연결할 수도 있습니다.
TwinCAT에서 제어하기
TwinCAT에서 제공하는 모션 제어 플랫폼을 이용하여 모터를 제어할 수 있습니다.
모션 컨트롤을 위해서는 NC PTP 이상의 라이선스를 필요로 합니다.
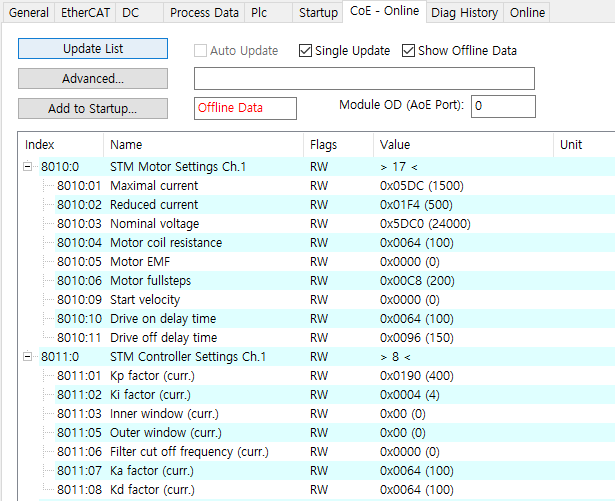
EL7031과 같은 Beckhoff 스텝 모터
터미널을 사용할 경우에는 터미널에서 제공하는 CoE Parameter를 이용하여 kp 같은 값을 Tuning을 할 수 있으며, MOTION의
드라이브와 엔코더는 동일하게 Beckhoff 스테퍼 모터 드라이브로 이용하게 됩니다.
EL2522와 같은 Pulse Train을 사용할 경우에는, CoE에서 모터에 대한 부분은 설정할 수 있지만 Kp와 같은 값을 이용하여 Tuning 할 수는 없습니다. Pulse 값 그대로 이용하기 때문입니다. 추가적으로 엔코더가 필요할 경우에는 EL5101을 이용하며 이 경우에는 MOTION의 드라이브는 EL2522, 엔코더는 EL5101로 개별 설정해야 합니다.
또한 TwinCAT에서 스텝 모터를 이용한 샘플은 아래 링크에서 확인할 수 있습니다.
[링크]
동영상으로 확인하기
위에서 소개한 Beckhoff 스텝 모터 드라이브 및 EL2522를 활용하여 실제로 스텝모터를 구동한 모습을 촬영했습니다.
<테스트 환경>
-
CX5140
+ EK1100 + EL7031, EL7047, EL2522
EL7047을 사용하여 구동하기
마치며
Beckhoff 시스템으로 스텝 모터를 사용할 수 있다는 것을 살펴보았습니다. 타사 모터를 이용할 경우에는 ESI(EtherCAT Slave Information) 파일이 필요하거나 하는 사전 준비 단계가 있지만 충분히 Beckhoff 시스템으로 구성할 수 있습니다.
또한 TwinCAT의 MOTION 제어를 이용하여 보다 파워풀한 제어를 할 수 있습니다. 모터 구동에 필요한 다양한 파라미터를 손쉽게 설정하는 것부터, 스텝 모터도 Function Block을 이용하여 제어가 가능합니다.
[1] 스테퍼 모터(Stepper Motor), 스테핑 모터(Stepping Motor)라고도 한다.
위 내용에 대해 심화 내용이 필요하신 경우,
해당 내용을 댓글로 적어 주시면 다음 연재 시 반영하도록 하겠습니다.
문의사항은 아래 연락처로 연락 부탁드립니다.
전화 :
02-2107-3242 (대표전화, 내선번호 1번: 영업 및 마케팅, 내선번호 2번: 기술)
홈페이지 : https://www.beckhoff.com/kr/
제품문의 : Info-KR@beckhoff.com
Beckhoff Stepper Motor AS1000 : https://download.beckhoff.com/download/document/motion/as1000_ba_en.pdf
Beckhoff Stepper Motor Terminals EL70x1 : https://download.beckhoff.com/download/document/io/ethercat-terminals/el70x1en.pdf
Pulse Train Output Terminal EL252x : https://download.beckhoff.com/download/document/io/ethercat-terminals/el252xen.pdf
Incremental Encoder Interface EL5101 : https://download.beckhoff.com/download/document/io/ethercat-terminals/el5101en.pdf]
본 문서의 무단전재 및 재배포를 금지합니다
본 문서는 공식 매뉴얼이 아닌, 교육용 참고자료임을 명시합니다
2020. 11. 27
작성자: Beckhoff Korea / Lisa Kim



댓글
댓글 쓰기